
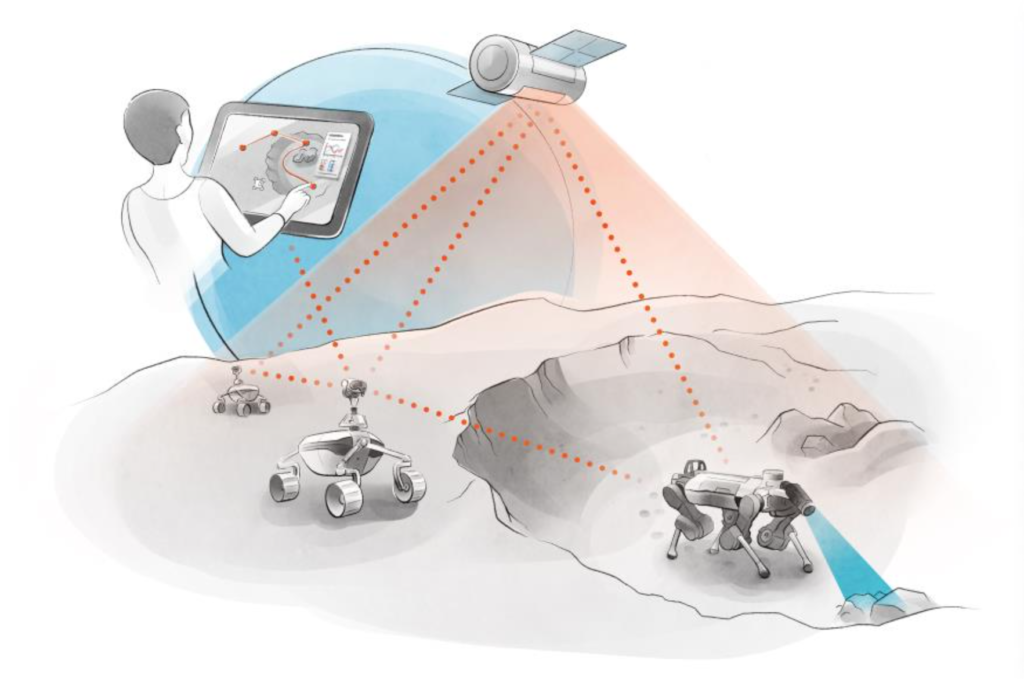

Project PROFILER develops the technology to enable scientifically informed autonomous exploration of remote planets using a heterogenous team of robots. We enable scientist to define mission scenarios and to direct a fleet of collaborative robots to interesting and previously inaccessible areas. Besides established robot systems that offer access to flat terrain, a new generation of highly-mobile legged robots will be able to climb down steep crater walls or enter tight caves or lava tubes to actively collect data for the scientist. Thereby, onboard evaluation and interpretation of the instrument payload is used for informed navigation of the robots. With this setup, the solution can maximally utilize the available operation time and supply the scientist with an unprecedented volume and quality of data at potentially unexplored areas of remote planets.





